




Scaling Deep Learning Workloads in a GPU Accelerated Virtualized Environment
Introduction
Demand for compute, parallel, and distributed training is ever increasing in the field of deep learning (DL). The introduction of large-scale language models such as Megatron-Turing NLG (530 billion parameters; see References 1 below) highlights the need for newer techniques to handle parallelism in large-scale model training. Impressive results from transformer models in natural language have paved a way for researchers to apply transformer-based models in computer vision. The ViT-Huge (632 million parameters; see References 2 below) model, which uses a pure transformer applied to image patches, achieves amazing results in image classification tasks compared to state-of-the-art convolutional neural networks.
Larger DL models require more training time to achieve convergence. Even smaller models such as EfficientNet (43 million parameters; see References 3 below) and EfficientNetV2 (24 million parameters; see References 3 below) can take several days to train depending on the size of data and the compute used. These results clearly show the need to train models across multiple compute nodes with GPUs to reduce the training time. Data scientists and machine learning engineers can benefit by distributing the training of a DL model across multiple nodes. The Dell Validated Design for AI shows how software-defined infrastructure with virtualized GPUs is highly performant and suitable for AI (Artificial Intelligence) workloads. Different AI workloads require different resources sizing, isolation of resources, use of GPUs, and a better way to scale across multiple nodes to handle the compute-intensive DL workloads.
This blog demonstrates the use and performance across various settings such as multinode and multi-GPU workloads on Dell PowerEdge servers with NVIDIA GPUs and VMware vSphere.
System Details
The following table provides the system details:
Table 1: System details
Component | Details |
Server | Dell PowerEdge R750xa (NVIDIA-Certified System) |
Processor | 2 x Intel Xeon Gold 6338 CPU @ 2.00 GHz |
GPU | 4 x NVIDIA A100 PCIe |
Network Adapter | Mellanox ConnectX-6 Dual port 100 GbE |
Storage | Dell PowerScale |
ESXi Version | 7.0.3 |
BIOS Version | 1.1.3 |
GPU Driver Version | 470.82.01 |
CUDA Version | 11.4 |
Setup for multinode experiments
To achieve the best performance for distributed training, we need to perform the following high-level steps when the ESXi server and virtual machines (VMs) are created:
- Enable Address Translation Services (ATS) on VMware ESXi and VMs to enable peer to peer (P2P) transfers with high performance.
- Enable ATS on the ConnectX-6 NIC.
- Use the ibdev2netdev utility to display the installed Mellanox ConnectX-6 card and mapping between logical and physical ports, and enable the required ports.
- Create a Docker container with Mellanox OFED drivers, Open MPI Library, and NVIDIA optimized TensorFlow (the DL framework that is used in the following performance tests).
- Set up a keyless SSH login between VMs.
- When configuring multiple GPUs in the VM, connect the GPUs with NVLINK.
Performance evaluation
For the evaluation, we used VMs with 32 CPUs, 64 GB of memory, and GPUs (depending on the experiment). The evaluation of the training performance (throughput) is based on the following scenarios:
- Scenario 1—Single node with multiple VMs and multi-GPU model training
- Scenario 2—Multinode model training (distributed training)
Scenario 1
Imagine the case in which there are multiple data scientists working on building and training different models. It is vital to strictly isolate resources that are shared between the data scientists to run their respective experiments. How effectively can the data scientists use the resources available?
The following figure shows several experiments on a single node with four GPUs and the performance results. For each of these experiments, we run tf_cnn_benchmarks with the ResNet50 model with a batch size of 1024 using synthetic data.
Note: The NVIDIA A100 GPU supports a NVLink bridge connection with a single adjacent NVIDIA A100 GPU. Therefore, the maximum number of GPUs added to a single VM for multi-GPU experiments on a Dell PowerEdge R750xa server is two.
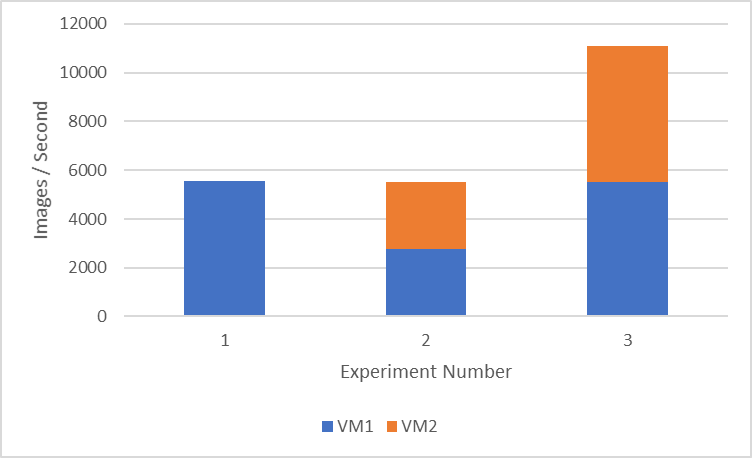
Figure 1: Performance comparison of multi-VMs and multi-GPUs on a single node
Figure 1 shows the throughput (the average on three runs) of three different experiment setups:
- Setup 1 consists of a single VM with two GPUs. This setup might be beneficial to run a machine learning workload, which needs more GPUs for faster training (5500 images/second) but still allows the remaining resources in the available node for other data scientists to use.
- Setup 2 consists of two VMs with one GPU each. We get approximately 2700 images/second on each VM, which can be useful to run multiple hyper-parameter search experiments to fine-tune the model.
- Setup 3 consists of two VMs with two GPUs each. We use all the GPUs available in the node and show the maximum cumulative throughput of approximately 11000 images/second between two VMs.
Scenario 2
Training large DL models requires a large amount of compute. We also need to ensure that the training is completed in an acceptable amount of time. Efficient parallelization of deep neural networks across multiple servers is important to achieve this requirement. There are two main algorithms when we address distributed training, data parallelism, and model parallelism. Data parallelism allows the same model to be replicated in all nodes, and we feed different batches of input data to each node. In model parallelism, we divide the model weights to each node and the same minibatch data is trained across the nodes.
In this scenario, we look at the performance of data parallelism while training the model using multiple nodes. Each node receives different minibatch data. In our experiments, we scale to four nodes with one VM and one GPU each.
To help with scaling models to multiple nodes, we use Horovod (see References 6 below ), which is a distributed DL training framework. Horovod uses the Message Passing Interface (MPI) to effectively communicate between the processes.
MPI concepts include:
- Size indicates the total number of processes. In our case, the size is four processes.
- Rank is the unique ID for each process.
- Local rank indicates the unique process ID in a node. In our case, there is only one GPU in each node.
- The Allreduce operation aggregates data among multiple processes and redistributes them back to the process.
- The Allgather operation is used to gather data from all the processes.
- The Broadcast operation is used to broadcast data from one process identified by root to other processes.
The following table provides the scaling experiment results:
Table 2: Scaling experiments results
Number of nodes | VM Throughput (images/second) |
1 | 2757.21 |
2 | 5391.751667 |
4 | 10675.0925 |
For the scaling experiment results in the table, we run tf_cnn_benchmarks with the ResNet50 model with a batch size of 1024 using synthetic data. This experiment is a weak scaling-based experiment; therefore, the same local batch size of 1024 is used as we scale across nodes.
The following figure shows the plot of speedup analysis of scaling experiment:
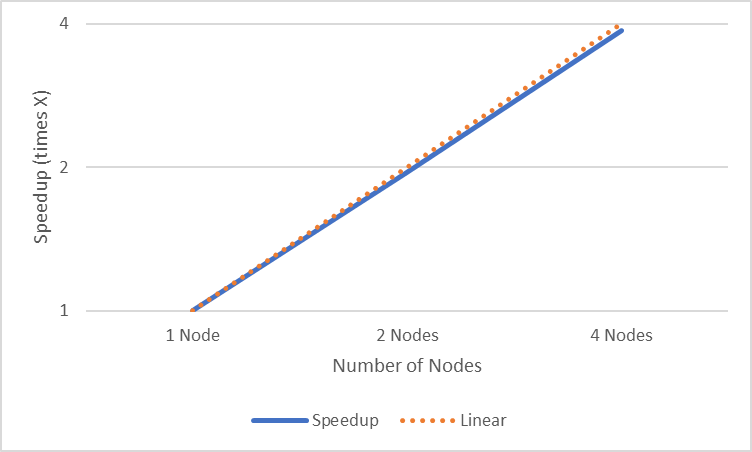
Figure 2: Speedup analysis of scaling experiment
The speedup analysis in Figure 2 shows the speedup (times X) when scaling up to four nodes. We can clearly see that it is almost linear scaling as we increase the number of nodes.
The following figure shows how multinode distributed training on VMs compares to running the same experiments on bare metal (BM) servers:
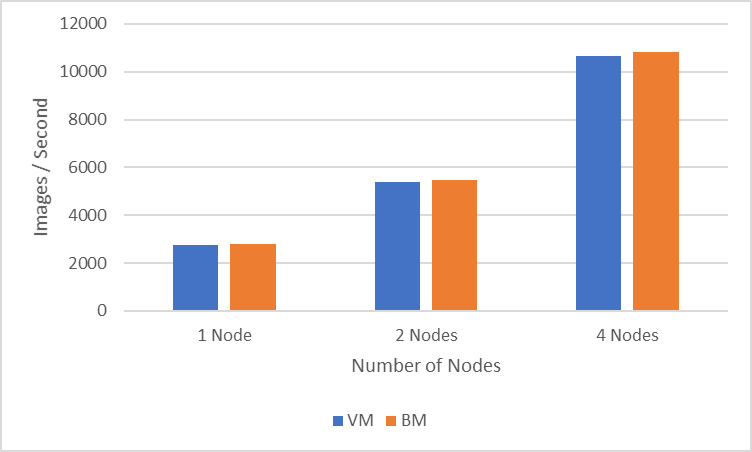
Figure 3: Performance comparison between VMs and BM servers
The four-nodes experiment (one GPU per node) achieves a throughput of 10675 images/second in the VM environment while the similarly configured BM run achieves a throughput of 10818 images/second. One-, two-, and four-node experiments show a percentage difference of less than two percent between BM experiments and VM experiments.
Conclusion
In this blog, we described how to set up the ESXi server and VMs to be able to run multinode experiments. We examined various scenarios in which data scientists can benefit from multi-GPU experiments and their corresponding performance. The multinode scaling experiments showed how the speedup is closer to linear scaling. We also examined how VM-based distributed training compares to BM-server based distributed training. In upcoming blogs, we will look at best practices for multinode vGPU training, and the use and performance of NVIDIA Multi-Instance GPU (MIG) for various deep learning workloads.
References
- Using DeepSpeed and Megatron to Train Megatron-Turing NLG 530B, the World’s Largest and Most Powerful Generative Language Model
- An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
- EfficientNetV2: Smaller Models and Faster Training
- Virtualizing GPUs for AI with VMware and NVIDIA Based on Dell Infrastructure Design Guide
- https://github.com/horovod/horovod
Contributors
Contributors to this blog: Prem Pradeep Motgi and Sarvani Vemulapalli
Related Blog Posts

Accelerating Distributed Training in a Multinode Virtualized Environment
Fri, 13 May 2022 13:57:13 -0000
|Read Time: 0 minutes
Introduction
In the age of deep learning (DL), with complex models, it is vital to have a system that allows faster distributed training. Depending on the application, some DL models require more frequent retraining and fine-tuning of the hyperparameters to be deployed in the production environment. It is important to understand the best practices to improve multinode distributed training performance.
Networking is critical in a distributed training setup as there are numerous gradients exchanged between the nodes. The complexity increases as we increase the number of nodes. In the past, we have seen the benefits of using:
- Direct Memory Access (DMA), which enables a device to access host memory without the intervention of CPUs
- Remote Direct Memory Access (RDMA), which enables access to memory on a remote machine without interrupting the CPU processes on that system
This blog examines performance when direct communication is established between the GPUs in multinode training experiments run on Dell PowerEdge servers with NVIDIA GPUs and VMware vSphere.
GPUDirect RDMA
Introduced as part of Kepler class GPUs and CUDA 5.0, GPUDirect RDMA enables a direct communication path between NVIDIA GPUs and third-party devices such as network interfaces. By establishing direct communication between the GPUs, we can eliminate the critical bottleneck where data needs to be moved into the host system memory before it can be sent over the network, as shown in the following figure:
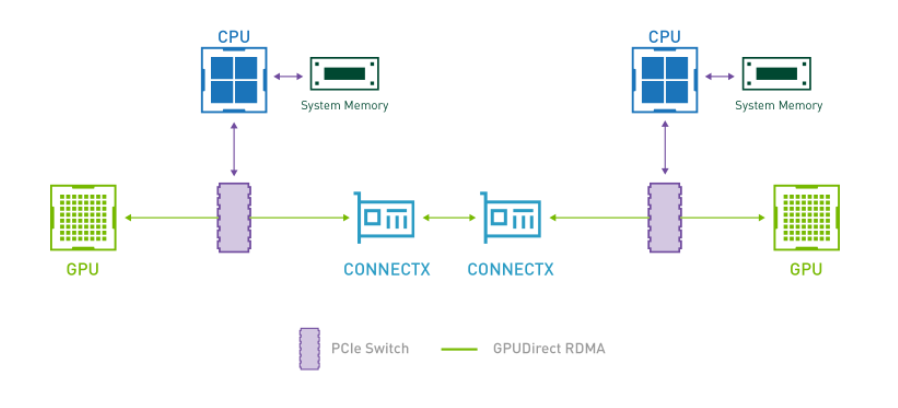
Figure 1: Direct Communication – GPUDirect RDMA
For more information, see:
System details
The following table provides the system details:
Table 1: System details
Component | Details |
Server | Dell PowerEdge R750xa (NVIDIA-Certified System) |
Processor | 2 x Intel Xeon Gold 6338 CPU @ 2.00 GHz |
GPU | 4 x NVIDIA A100 PCIe |
Network adapters | Mellanox ConnectX-6 Dual port 100 GbE and 25 GbE |
Storage | Dell PowerScale |
ESXi version | 7.0.3 |
BIOS version | 1.1.3 |
GPU driver version | 470.82.01 |
CUDA Version | 11.4 |
Setup
The setup for multinode training in a virtualized environment is outlined in our previous blog.
At a high level, after Address Translation Services (ATS) is enabled on VMware ESXi, the VMs, and ConnectX-6 NIC:
- Enable mapping between logical and physical ports.
- Create a Docker container with Mellanox OFED drivers, Open MPI Library, and NVIDIA-optimized TensorFlow.
- Set up a keyless SSH login between VMs
Performance evaluation
For evaluation, we use tf_cnn_benchmarks using the ResNet50 model and synthetic data with a local batch size of 1024. Each VM is configured with 32 vCPUs, 64 GB of memory, and one NVIDIA A100 PCIE 80 GB GPU. The experiments are performed by using a data parallelism approach in a distributed training setup, scaling up to four nodes. The results are based on averaging three experiment runs. Single-node experiments are only for comparison as there is no internode communication.
Note: Use the ibdev2netdev utility to display the installed Mellanox ConnectX-6 card along with the mapping of ports. In the following figures, ON and OFF indicate if the mapping is enabled between logical and physical ports.
The following figure shows performance when scaling up to four nodes using Mellanox ConnectX-6 Dual Port 100 GbE. It is clear that the throughput increases significantly when the mapping is enabled (ON), providing direct communication between NVIDIA GPUs. The two-node experiments show an improvement in throughput of 18.7 percent while the four node experiments improve throughput by 26.7 percent.
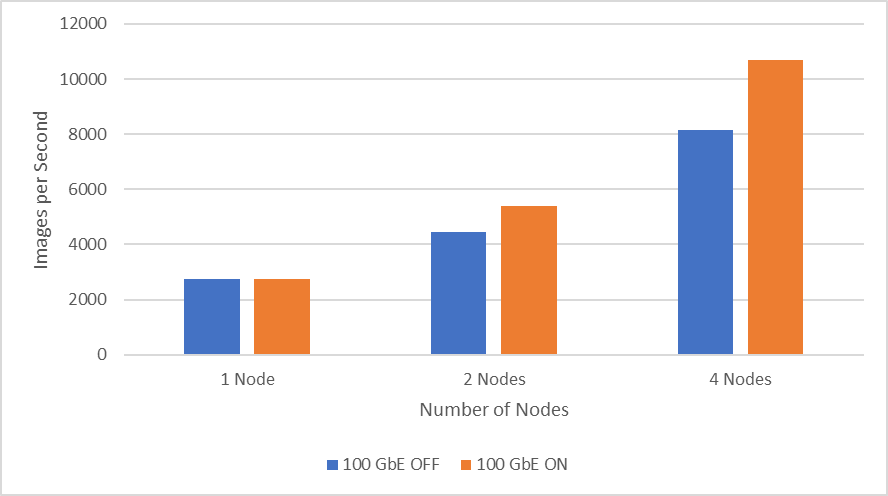
Figure 2: 100 GbE network performance
The following figure shows the scaling performance comparison between Mellanox ConnectX-6 Dual Port 100 GbE and Mellanox ConnectX-6 Dual Port 25 GbE while performing distributed training of the ResNet50 model. Using 100 GbE, two-node experiment results show an improved throughput of six percent while four-node experiments show an improved performance of 11.6 percent compared to 25 GbE.
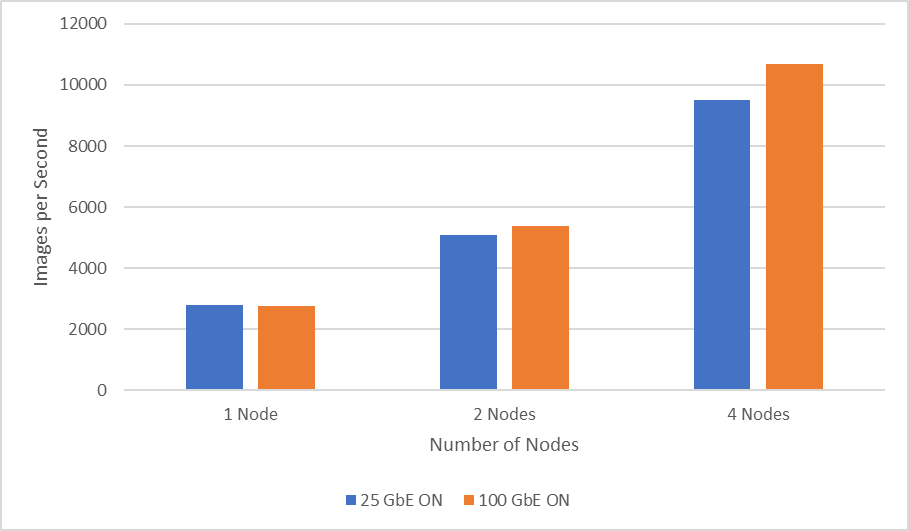
Figure 3: 25 GbE compared to 100 GbE network performance
Conclusion
In this blog, we considered GPUDirect RDMA and a few required steps to setup multinode experiments in the virtualized environment. The results showed that scaling to a larger number of nodes boosts throughput significantly when establishing direct communication between GPUs in a distributed training setup. The blog also showcased the performance comparison between Mellanox ConnectX-6 Dual Port 100 GbE and 25 GbE network adapters used for distributed training of a ResNet50 model.

MLPerf™ v1.1 Inference on Virtualized and Multi-Instance GPUs
Mon, 16 May 2022 18:49:23 -0000
|Read Time: 0 minutes
Introduction
Graphics Processing Units (GPUs) provide exceptional acceleration to power modern Artificial Intelligence (AI) and Deep Learning (DL) workloads. GPU resource allocation and isolation are some of the key components that data scientists working in a shared environment use to run their DL experiments effectively. The need for this allocation and isolation becomes apparent when a single user uses only a small percentage of the GPU, resulting in underutilized resources. Due to the complexity of the design and architecture, maximizing the use of GPU resources in shared environments has been a challenge. The introduction of Multi-Instance GPU (MIG) capabilities in the NVIDIA Ampere GPU architecture provides a way to partition NVIDIA A100 GPUs and allow complete isolation between GPU instances. The Dell Validated Design showcases the benefits of virtualization for AI workloads and MIG performance analysis. This design uses the most recent version of VMware vSphere along with the NVIDIA AI Enterprise suite on Dell PowerEdge servers and VxRail Hyperconverged Infrastructure (HCI). Also, the architecture incorporates Dell PowerScale storage that supplies the required analytical performance and parallelism at scale to feed the most data-hungry AI algorithms reliably.
In this blog, we examine some key concepts, setup, and MLPerf Inference v1.1 performance characterization for VMs hosted on Dell PowerEdge R750xa servers configured with MIG profiles on NVIDIA A100 80 GB GPUs. We compare the inference results for the ResNet50 and Bidirectional Encoder Representations from Transformers (BERT) models.
Key Concepts
Key concepts include:
- Multi-Instance GPU (MIG)—MIG capability is an innovative technology released with the NVIDIA A100 GPU that enables partitioning of the A100 GPU up to seven instances or independent MIG devices. Each MIG device operates in parallel and is equipped with its own memory, cache, and streaming multiprocessors.
In the following figure, each block shows a possible MIG device configuration in a single A100 80 GB GPU:
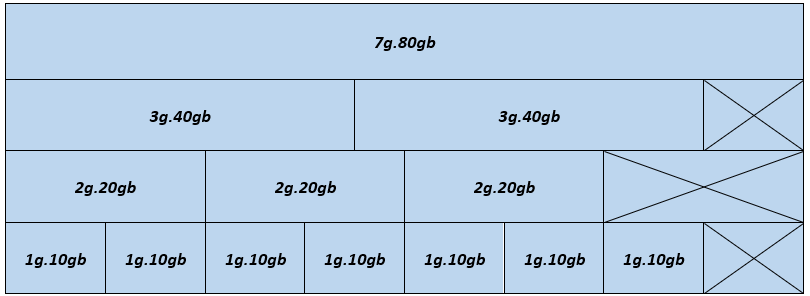
Figure 1- MIG device configuration - A100 80 GB GPU
The figure illustrates the physical location of GPU instances after they have been instantiated on the GPU. Because GPU instances are generated and destroyed at various locations, fragmentation might occur. The physical location of one GPU instance influences whether more GPU instances can be formed next to it.
Supported profiles for the A100 80GB GPU include:
- 1g.10gb
- 2g.20gb
- 3g.40gb
- 4g.40gb
- 7g.80gb
In Figure 1, a valid combination is constructed by beginning with an instance profile on the left and progressing to the right, ensuring that no two profiles overlap vertically. For detailed information about NVIDIA MIG profiles, see the NVIDIA Multi-Instance GPU User Guide.
- MLPERF—MLCommons™ is a consortium of leading researchers in AI from academia, research labs, and industry. Its mission is to "develop fair and useful benchmarks" that provide unbiased evaluations of training and inference performance for hardware, software, and services—all under controlled conditions. The foundation for MLCommons began with the MLPerf benchmark in 2018, which rapidly scaled as a set of industry metrics to measure machine learning performance and promote transparency of machine learning techniques. To stay current with industry trends, MLPerf is always evolving, conducting new tests, and adding new workloads that represent the state of the art in AI.
Setup for MLPerf Inference
A system under test consists of an ESXi host that can be operated from vSphere.
System details
The following table provides the system details.
Table 1: System details
Server | Dell PowerEdge R750xa (NVIDIA-Certified System) |
Processor | 2 x Intel Xeon Gold 6338 CPU @ 2.00 GHz |
GPU | 4 x NVIDIA A100 PCIe (PCI Express) 80 GB |
Network adapter | Mellanox ConnectX-6 Dual Port 100 GbE |
Storage | Dell PowerScale |
ESXi version | 7.0.3 |
BIOS version | 1.1.3 |
GPU driver version | 470.82.01 |
CUDA version | 11.4 |
System configuration for MLPerf Inference
The configuration for MLPerf Inference on a virtualized environment requires the following steps:
- Boot the host with ESXi (see Installing ESXi on the management hosts), install the NVIDIA bootbank driver, enable MIG, and restart the host.
- Create a virtual machine (VM) on the ESXi host with EFI boot mode (see Using GPUs with Virtual Machines on vSphere – Part 2: VMDirectPath I/O) and add the following advanced configuration settings:
pciPassthru.use64bitMMIO: TRUE pciPassthru.allowP2P: TRUE pciPassthru.64bitMMIOSizeGB: 64
- Change the VM settings and add a new PCIe device with a MIG profile (see Using GPUs with Virtual Machines on vSphere – Part 3: Installing the NVIDIA Virtual GPU Technology).
- Boot the Linux-based operating system and run the following steps in the VM.
- Install Docker, CMake (see Installing CMake), the build-essentials package, and CURL
- Download and install the NVIDIA MIG driver (grid driver).
- Install the nvidia-docker repository (see NVIDIA Container Toolkit Installation Guide) for running nvidia-containers.
- Configure the nvidia-grid service to use the vGPU setting on the VM (see Using GPUs with Virtual Machines on vSphere – Part 3: Installing the NVIDIA Virtual GPU Technology) and update the licenses.
- Run the following command to verify that the setup is successful:
nvidia-smi
Note: Each VM consists of 32 vCPUs and 64 GB memory.
MLPerf Inference configuration for MIG
When the system has been configured, configure MLPerf v1.1 on the MIG VMs. To run the MLPerf Inference benchmarks on a MIG-enabled system under test, do the following:
- Add MIG details in the inference configuration file:
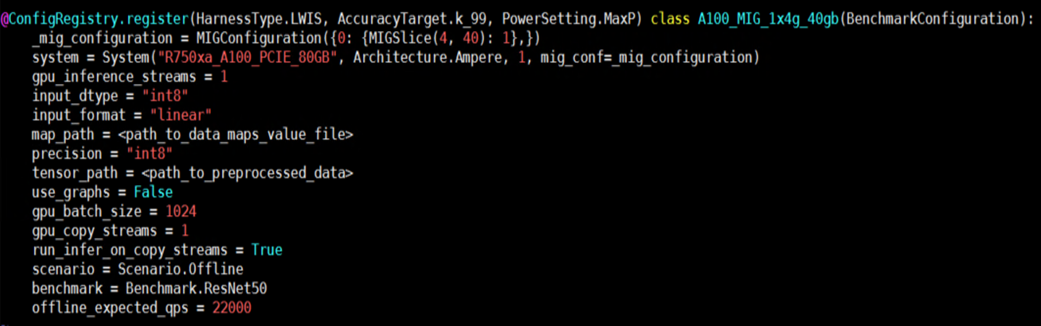 Figure 2- Example configuration for running inferences using MIG enabled VMs
Figure 2- Example configuration for running inferences using MIG enabled VMs - Add valid MIG specifications to the system variable in the system_list.py file.
 Figure 3- Example system entry with MIG profiles
Figure 3- Example system entry with MIG profiles
These steps complete the system setup, which is followed by building the image, generating engines, and running the benchmark. For detailed instructions, see our previous blog about running MLPerf v1.1 on bare metal systems.
MLPerf v1.1 Benchmarking
Benchmarking scenarios
We assessed inference latency and throughput for ResNet50 and BERT models using MLPerf Inference v1.1. The scenarios in the following table identify the number of VMs and corresponding MIG profiles used in performance tests. The total number of tests for each scenario is 57. The results are averaged based on three runs.
Note: We used MLPerf Inference v1.1 for benchmarking but the results shown in this blog are not part of the official MLPerf submissions.
Table 2: Scenarios configuration
Scenario | MIG profiles | Total VMs |
1 | MIG nvidia-7-80c | 1 |
2 | MIG nvidia-4-40c | 1 |
3 | MIG nvidia-3-40c | 1 |
4 | MIG nvidia-2-20c | 1 |
5 | MIG nvidia-1-10c | 1 |
6 | MIG nvidia-4-40c + nvidia-2-20c + nvidia-1-10c | 3 |
7 | MIG nvidia-2-20c + nvidia-2-20c + nvidia-2-20c + nvidia-1-10c | 4 |
8 | MIG nvidia-1-10c* 7 | 7 |
ResNet50
ResNet50 (see Deep Residual Learning for Image Recognition) is a widely used deep convolutional neural network for various computer vision applications. This neural network can address the disappearing gradients problem by allowing gradients to traverse the network's layers using the concept of skip connections. The following figure shows an example configuration for ResNet50 inference:
Figure 4- Configuration for running inference using Resnet50 model
The following figure shows ResNet50 inference performance based on the scenarios in Table 2: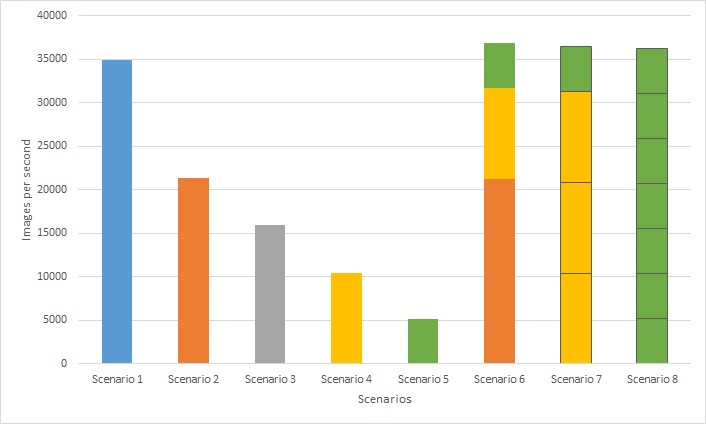
Figure 5- ResNet50 Performance throughput of MLPerf Inference v1.1 across various VMs with MIG profiles
Multiple data scientists can use all the available GPU resources while running their individual workloads on separate instances, improving overall system throughput. This result is clearly seen on Scenarios 6 through 8, which contain multiple instances, compared to Scenario 1 which consists of a single instance with the largest MIG profile for A100 80 GB. Scenario 6 achieves the highest overall system throughput (5.77 percent improvement) compared to Scenario 1. Also, Scenario 8 shows seven VMs equipped with individual GPU instances that can be built for up to seven data scientists who can fine-tune their ResNet50 base models.
BERT
BERT (see BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding) is a state-of-the-art language representational model. BERT is essentially a stack of Transformer encoders. It is suitable for neural machine translation, question answering, sentiment analysis, and text summarization, all of which require a working knowledge of the target language.
BERT is trained in two stages:
- Pretrain—During which the model acquires language and context understanding
- Fine-tuning—During which the model acquires task-specific knowledge such as querying and response.
The following figure shows an example configuration for BERT inference:
Figure 6- Configuration for running inference using BERT model
The following figure shows BERT inference performance based on scenarios in Table 2:
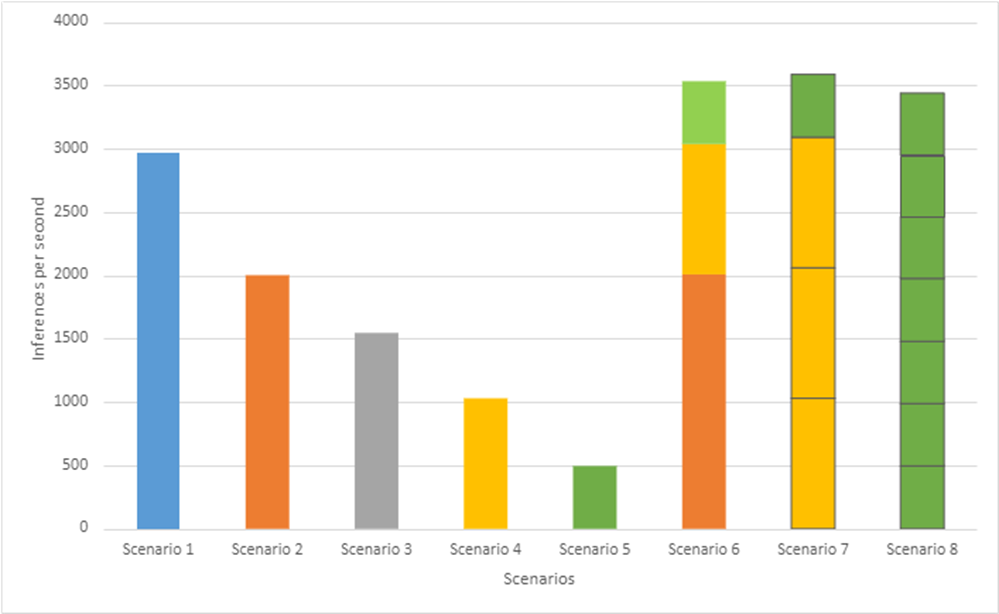 Figure 7- BERT Performance throughput of MLPerf Inference v1.1 across various VMs with MIG profiles
Figure 7- BERT Performance throughput of MLPerf Inference v1.1 across various VMs with MIG profiles
Like Resnet50 Inference performance, we clearly see that Scenarios 6 through 8, which contain multiple instances, perform better compared to Scenario 1. Particularly, Scenario 7 achieves the highest overall system throughput (21 percent improvement) compared to Scenario 1 while achieving 99.9 percent accuracy target. Also, Scenario 8 shows seven VMs equipped with individual GPU instances that can be built for up to seven data scientists who want to fine-tune their BERT base models.
Conclusion
In this blog, we describe how to install and configure MLPerf Inference v1.1 on Dell PowerEdge 750xa servers using a VMware-virtualized infrastructure and NVIDIA A100 GPUs. Furthermore, we examine the performance of single- and multi-MIG profiles running on the A100 GPU. If your ML workload is primarily inferencing-focused and response time is not an issue, enabling MIG on the A100 GPU can ensure complete GPU use with maximum throughput. Developers can use VMs with an independent GPU compute allocated to them. Also, in cases where the largest MIG profiles are used, performance is comparable to bare metal systems. Inference results from ResNet50 and BERT models demonstrate that overall system performance using either the whole GPU or multiple VMs with MIG instances hosted on an R750xa system with VMware ESXi and NVIDIA A100 GPUs performed well and produced valid results for MLPerf Inference v1.1. In both the cases, the average throughput and latency are equal. This result confirms that MIG provides predictable latency and throughput independent of other processes operating on the MIG instances on the GPU.
There is a MIG limitation for GPU profiling on the VMs. Due to the shared nature of the hardware performance across all MIG devices, only one GPU profiling session can run on a VM; parallel GPU profiling sessions on a single VM are not possible.