
The Importance of Environmental Simulation
The Importance of Environmental Simulation
-
Unlike deterministic software systems, autonomous systems are developed and trained through AI learning frameworks. These frameworks consume labeled training data, and the AI system adapts to provide the optimal response through a process called Network Training. Once the system is developed and trained, it is essential for the system that is under test to perform in a new environment that is not seen during the Networking Training process. The Network Validation process determines if the system makes the right or optimal decision and performs accordingly. This process is especially important for systems like ADAS/AD that are life-safety critical.
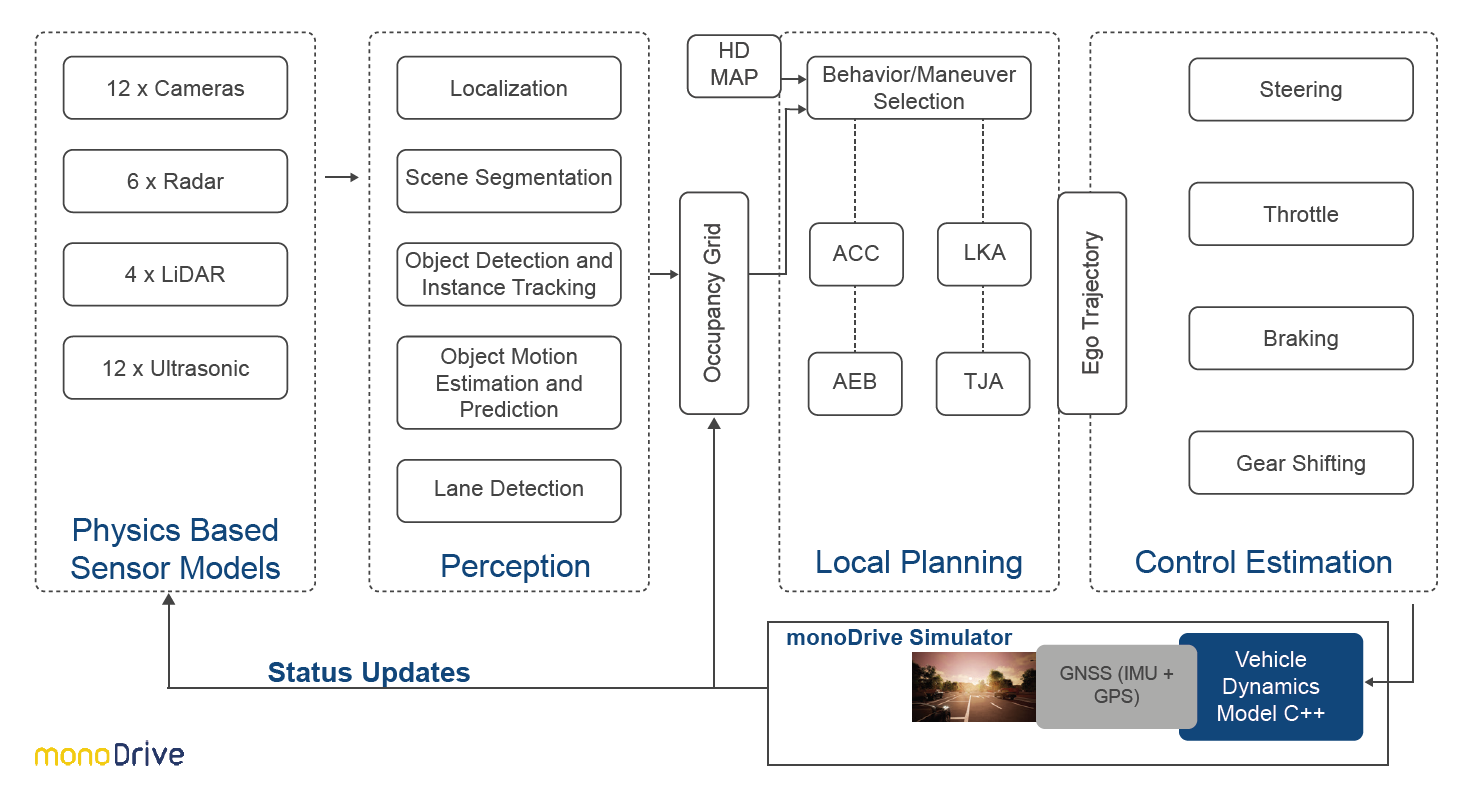
The ADAS/AD development cycle must ensure the safety of the vehicle and passengers. NHTSA believes that advanced crash avoidance and mitigation technologies will dramatically increase the safety of a vehicle.[1] One key automotive safety technology that falls into the advanced crash avoidance category is the Automatic Emergency Braking (AEB) system. The vehicle perceives and predicts that it will impact another vehicle or object, so a decision is made within milliseconds to activate the braking system in order to avoid an impending collision. This action requires the receipt of input from multiple sensor systems (camera, radar, lidar, and ultrasonic), interpretation of the meaning of the data, and then performing the appropriate action. ADAS/AD systems require testing and operation in real-world conditions for tens to hundreds of millions of kilometers to ensure that they can safely operate. The systems must also be validated using thousands of targeted safety scenarios like AEB. But once in production, the vehicle’s models will decay and will require upgrades while enhancements will require reverification.
The thorough testing of autonomous capabilities with real vehicular systems is not only cost prohibitive, but often, impossible to validate without environmental simulation. It is much more cost effective and flexible to use high-fidelity simulation systems that harness the power of compute and storage to automate environmental and scenario testing.
The simulation system needs to operate and process immense levels of data (up to ten terabytes/hour per system under test), and react within a short timeframe. It also needs to meet other key requirements:
- Physics based: Must follow the same rules of nature as we all do the application of force, motion, and the reaction to gravity. The simulation environment needs to correctly model material and channel effects in ultrasonic (20 to80 kHz), electromagnetic frequencies (24 GHz to 79 GHz), and infrared optical wavelengths (905 to1550 nm).
- Photorealistic: Must match spectral imaging, white balance, color space, lens distortion, color depth, and exposure time to appear authentic to the system under test.
- Interactive: Interactions must be realistic and interactive with the environment, adjusting as the system under test is stimulated and reacts to the environment.
When the simulation system is remote or in the cloud, the conditions cannot be effectively managed. They are most optimally performed in edge environments on optimized platforms that are grouped with systems that are tested under latency-controlled conditions. All ADAS/AD systems require this capability as a fundamental component of the development process. Further, all autonomous systems require the flexibility of simulation to define unique scenarios for development and integration testing.
[1] https://www.safercar.gov/Vehicle-Shoppers/Safety-Technology/aeb–1